Marotocopter fue mi proyecto final de carrera, al terminar Ingeniería Técnica Industrial, especialidad en electrónica.

MarotoCopter v2.0
El titulo formal del proyecto fue:
» Diseño, control y construcción de un cuadricoptero »
Estuve un año entero investigando y construyéndolo.
Se realizaron 3 estructuras (frames) diferentes. Una de aluminio, otro con piezas 3D y el ultimo con fibra de carbono y piezas 3D.
Se fue desarrollando el software para posteriormente ajustar todo el control.
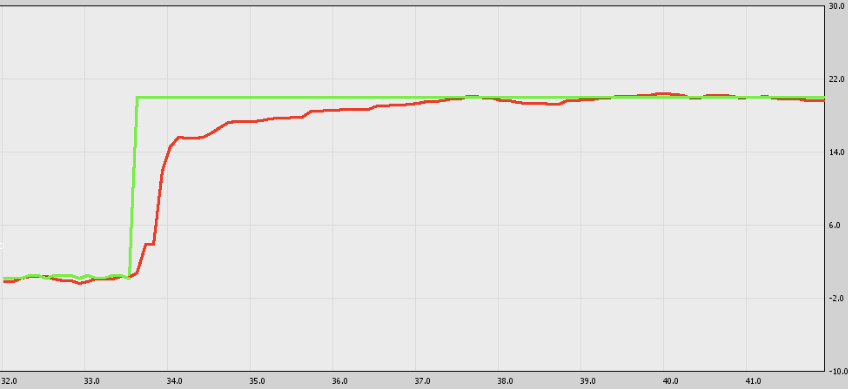
Control PID pitch – quadcopter
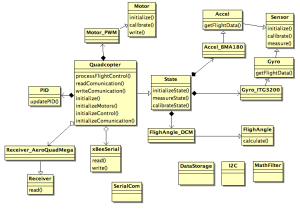
Diagrama de clases
Para hacer estable el cuadricoptero se emplearon 3 lazos de control PID. Para poder ajustar los PID y realizar pruebas se construyo el balancín, que permite sujetar el cuadricoptero por los lados.
El proyecto termino satisfactoriamente con una nota de Matricula de Honor.
Os dejo a continuación todo el material del proyecto, tanto la memoria detallada, como las piezas en 3D, el código en C++ (compatible con arduino) y unos vídeos.
Algunos vídeos del marotocopter funcionando

Marotocopter v2.0 volando
Memoria del proyecto final de carrera en .pdf
Codigo MarotoCopter